








Chapter 5: Antidifferentiation
A. Antiderivatives
The antiderivative or indefinite integral of a function f(x) is a function F(x) whose derivative is f(x).
Since the derivative of a constant equals zero, the antiderivative of f(x) is not unique; that is, if F(x) is an integral of f(x), then so is F(x) + C, where C is any constant.
The arbitrary constant C is called the constant of integration.
The indefinite integral of f(x) is written as ∫ f(x) dx; thus

The function f(x) is called the integrand.
The Mean Value Theorem can be used to show that, if two functions have the same derivative on an interval, then they differ at most by a constant; that is, if

then
F(x) − G(x) = C(C is a constant)
B. Basic Formulas
15.  16.
16. 
17. 
C. Integration by Partial Fractions
The method of partial fractions makes it possible to express a rational function f(x)/g(x) as a sum of simpler fractions.
Here f(x) and g (x) are real polynomials in x and it is assumed that f(x)/g(x) is a proper fraction; that is, that f(x) is of lower degree than g(x).
If not, we divide f(x) by g(x) to express the given rational function as the sum of a polynomial and a proper rational function. Thus,
where the fraction on the right is proper
Theoretically, every real polynomial can be expressed as a product of (powers of) real linear factors and (powers of) real quadratic factors.
In the following, the capital letters denote constants to be determined.
We consider only nonrepeating linear factors. For each distinct linear factor (x − a) of g(x) we set up one partial fraction of the type A/x−a.
The techniques for determining the unknown constants are illustrated in the following examples.
Example:
Find ∫ x cos x dx.
SOLUTION:
We let u = x and dv = cos x dx.
Then du = dx and v = sin x. Thus, the Parts Formula yields
∫ x cos x dx = x sin x − ∫ sin x dx = x sin x + cos x + C
The Tic-Tac-Toe Method
This method of integrating is extremely useful when repeated integration by parts is necessary. To integrate ∫ u(x)v(x) dx, we construct a table as follows:

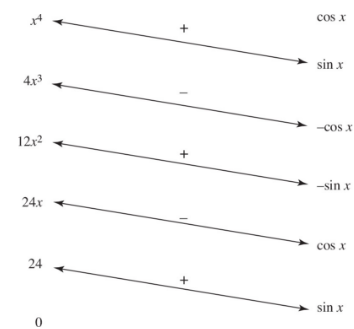
Here the column at the left contains the successive derivatives of u(x).
The column at the right contains the successive antiderivatives of v(x) (always with C = 0); that is, v(x) is the antiderivative of v(x), v2(x) is the antiderivative of v1(x), and so on.
The diagonal arrows join the pairs of factors whose products form the successive terms of the desired integral; above each arrow is the sign of that term. By the tic-tac-toe method,
∫ u(x)v(x)dx = u(x)v1(x) − u′(x)v2(x) + u″(x)v3(x) − u″′(x)v4(x) + . . . .
Example:
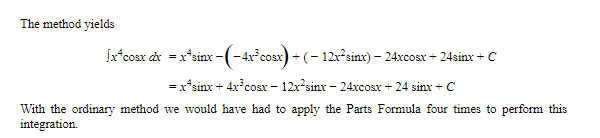
To integrate ∫ x4 cos x dx by the tic-tac-toe method, we let u(x) = x4 and v(x) = cos x, and get the following table:
E. Applications of Antiderivatives: Differential Equations
The following examples show how we use given conditions to determine constants of integration.
Example :
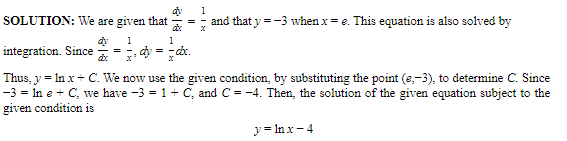
Find a curve whose slope at each point (x,y) equals the reciprocal of the x-value if the curve contains the point (e,−3).
SOLUTION: